重点プロジェクト
スマート高速化メンテナンスロボット・ソリューション
株式会社ハイボット
危険な場所や人が行けない場所での検査のために、AI・IoTを活用した故障予知と原因特定を行い、デジタルデータによる交換部品の設計・製造などロボットによる作業でMRO*1のSmart化と高速化(rapid)の実現を目指すプロジェクトです。
*1 Maintenance,Repair&Overhaul(=整備・修理・重整備(分解点検))の略称。
![]()
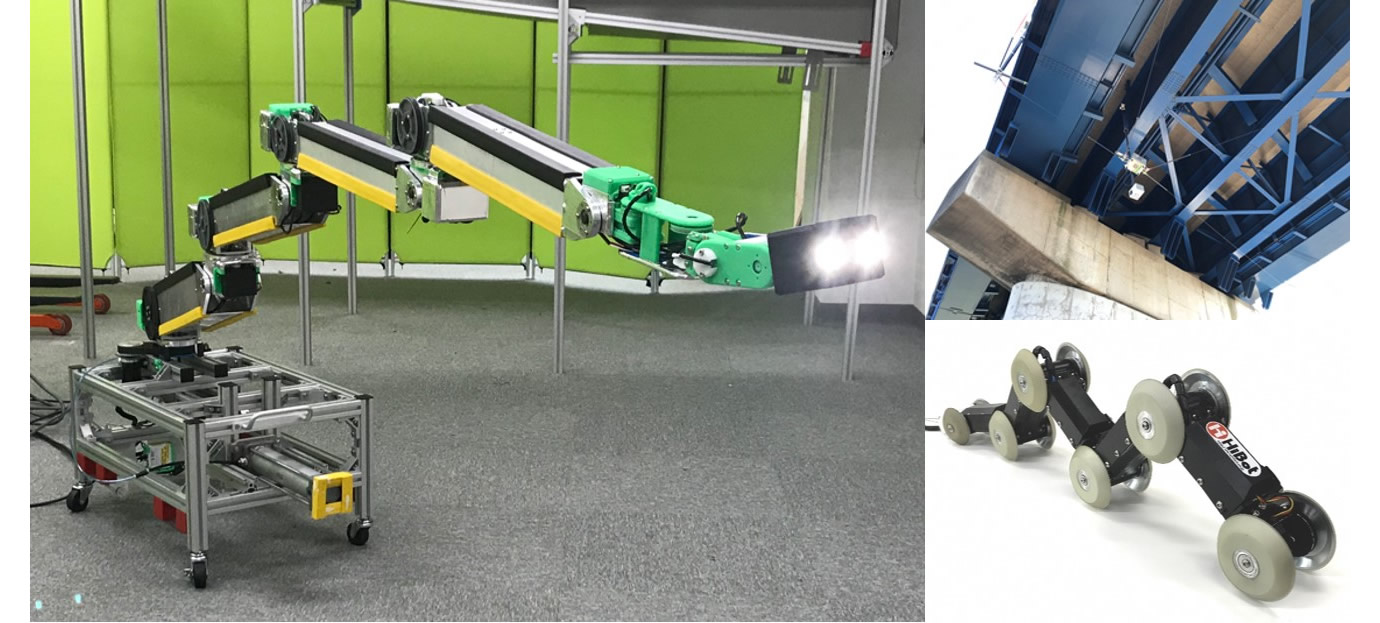
橋梁点検システムについては、平成28年度~30年度における公募型「実証実験支援事業」で実施した実証実験の結果を踏まえ平成30年度に完成し、実用化に向けて取り組んでいます。
蛇型マニピュレータロボットは化学・石油プラントや航空機の燃料タンク内など狭隘な空間での点検作業でのニーズが見込まれ、今後は①リンク4本まで連結しての動作確認と、②動きの制御とパス・プラニングのソフトウェアーの開発を行うとともに、小型化と軽量化を目指しています。