- ROBOT TOWN SAGAMI トップ
- さがみ発! 商品化ロボット
- Float Arm(フロートアーム)(株式会社ハイボット)

Float Arm(フロートアーム)(株式会社ハイボット)

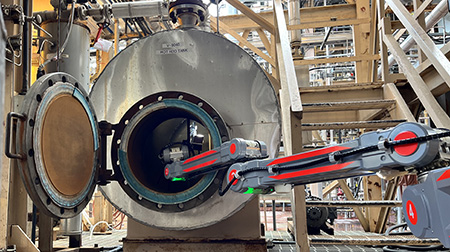

インフラ施設の点検作業向けにデザインされた多関節ロボットアーム
・狭あい・危険・過酷な環境で稼働しているインフラ施設の点検作業向けにデザインされた、多関節ロボットアームです。
・水平方向に7m、垂直方向に5m 以上のリーチを持ちながら、空気圧のパワーアシスト機能を用いることで、ロボット本体の軽量化を実現しています。
・アームの先端に超音波センサ、ガスセンサやカメラを取り付け、設備の肉厚測定や目視点検のデータを取得するとともに、搭載されているライダー(レーザー光を使ったセンサ)を用いて設備を仮想的に映し出すことにより、コンピュータの画面上で、設備点検が可能となります。また、点検内容によってアーム先端のツールを交換ができるため、お客様の点検ニーズに沿った様々なデバイスを装着できるような設計を実現しています。