- ROBOT TOWN SAGAMI トップ
- ロボット技術マッチングサイト
- 汎用ヒューマノイド型ロボットハンド

掲載日(更新日):令和3年1月
カスタマイズ可能な汎用性の高いヒューマノイド型ロボットハンドです
汎用ヒューマノイド型ロボットハンド
企業PR
40年の実績と経験を持つSIer事業と、福祉事業とを基軸としたサービスを提供する企業です。特注自動化装置の設計・製造販売と、その事業から生まれたロボットハンドなどの関連製品の設計製造、及び開発受託をお請けいたします。産学公連携事業も積極的に行っております。
各種自動化装置、ロボットハンドの試作、開発についてのご用命は是非ダブル技研株式会社までご連絡ください。
技術概要、製品仕様
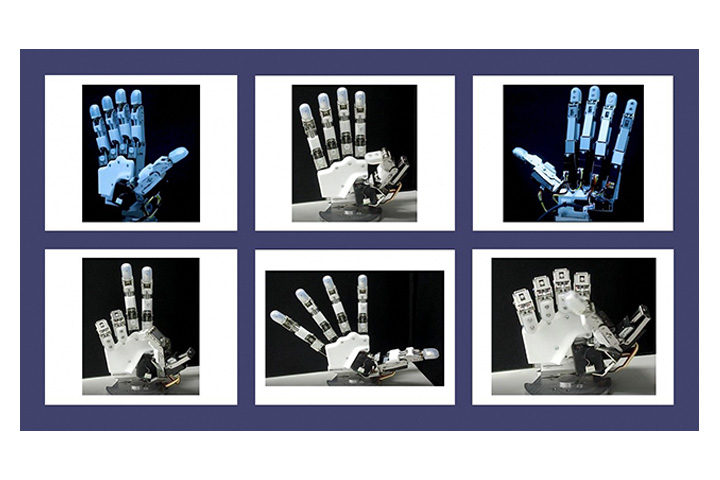
少ないモータで複数の関節を動かし、把持対象物の形状に倣って把持する機構を用いることで、軽量かつコストを抑えることに成功したヒューマノイドロボットハンドです。各指の屈伸は独立駆動で、人差し指を中心とした内転・外転の稼働可能です。付属ソフトを使用したティーチングによるハンドリングタスク動作の制御可能です。
〔主な仕様(予告なく変更する場合がございます。)〕
- 可搬質量:2kg
- 本体重量:0.8kg(ロボット側とのメカニカルインターフェース含まず)
- 稼働関節数/アクチュエータ数:17関節/7個
アピールポイント
ロボットハンドの開発には多くの場合、試作の繰り返しが必要となり、設計・試作評価の工数が嵩(かさ)み、膨大な開発費と期間を費やします。これに対し、本ロボットハンドを開発するための導入機とすることにより、開発コストと期間を大幅に短縮します。ハード単体としてのご購入の他、制御ソフトのライセンス契約により、ハード・ソフト面のアップデートが可能となるサービスを展開致します。
〔ハード及びティーチングソフトの販売開始:2020年11月より。
ライセンス販売開始:2021年1月。〕
ロボットへの応用イメージ
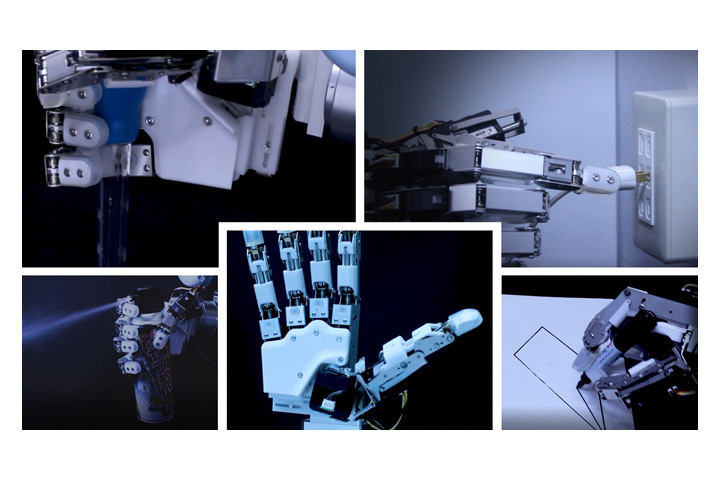
ヒューマノイド型ロボットのロボットハンドとしての用途の他、協働ロボットを含む産業用ロボットアームなどへの適用可能な汎用ロボットハンドです。
納入実績として、製造業における手作業自動化のためのマニピュレータ用のロボットハンド用途の他、遠隔操作用のアバター用のロボットハンドとしてご活用いただいております。

特記事項
本技術に関する取得特許:
- 特許6513118:「指機構およびマニピュレータ」
- 特許6568183:「指先機構」
企業の概要
- 企業名
- ダブル技研株式会社
- 所在地
- 神奈川県座間市栗原920-7
- 従業員数
- 17名
- 設立年月
- 1977年10月11日
- 資本金
- 9,610万円(資本準備金含む)
- ホームページ
- https://www.j-d.co.jp/index.html