- ROBOT TOWN SAGAMI トップ
- 県で取り組む実証実験やイベント
- ロボット実証実験レポート
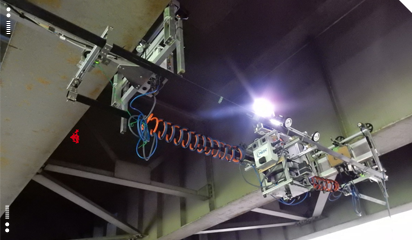
- ステレオカメラを搭載した橋梁近接目視代替ロボット(富士フイルム株式会社、株式会社イクシスリサーチ、一般財団法人首都高速道路技術センター)
県で取り組む実証実験やイベント
ステレオカメラを搭載した橋梁近接目視代替ロボット(富士フイルム株式会社、株式会社イクシスリサーチ、一般財団法人首都高速道路技術センター)
概要
ステレオカメラを搭載したロボットが、橋桁下フランジに懸垂した状態で移動しながら、鋼部材・床版を撮影。ステレオカメラにより、撮影対象物の寸法が測定可能。撮影した画像を分析し、ひび割れ箇所を自動で検出できるため、点検業務の効率化が期待できる。
【実施場所】毘沙門橋(毘沙門池公園敷地内に架かる部位)

実証実験の目的
ロボットの設置・稼動・撤収までの一連の作業を行うことで、汎用性及び使い勝手を検証する。ステレオカメラでの撮影機能やひび割れ箇所の自動抽出機能について、その精度・有効性を検証する。
検証結果
ロボットは全て順調に動作し、必要な箇所で十分な精度の画像を撮影することができた。ひび割れ箇所の自動抽出については、未検出のひびや誤検出のひびはあるものの、一定のひび検出性能が確認できた。
今後の取り組み
フランジ幅の変化箇所でのよりスムーズな動作、ひび割れ検出の精度向上、などを目指し機器の改良を行なうとともに、引き続き実証実験を行なう。
※本システムは、国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)の助成を受け、開発しているものです。