最優先課題は、人の命を守ること。
過酷な現場でいち早く情報収集するレスキューロボット
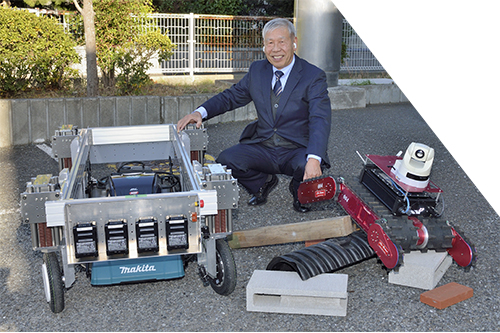
人が近寄ることのできない災害現場などで活躍するレスキューロボット。そのパイオニアとして研究開発を進め、実績を重ねてきた企業が、移動ロボット研究所です。災害大国である日本で、人を守るため、救うためにどのような活用が進められているのか、そして今後の可能性について、代表取締役の小栁栄次さんにお聞きします(記載内容は2023年度時点のものです。)。

小栁 栄次
株式会社移動ロボット研究所 代表取締役
1952年神奈川県横須賀市生まれ。1974年より神奈川県公立高等学校教諭。県立磯子工業高等学校機械科教諭、県立大船工業技術高等学校、県立横須賀工業高等学校を歴任。2002年筑波大学大学院工学研究科知能機能工学専攻にて博士号(工学)を取得。2002年桐蔭横浜大学工学部知能機械工学科助教授を経て教授に。2007年に株式会社移動ロボット研究所設立、代表取締役に就任し、現在に至る。研究課題は、制御性に優れたメカニズムの開発と本質安全設計。社訓は、技術をもって社会に貢献すること。日本ロボット学会正員、日本機械学会正員。

災害現場での貢献へ
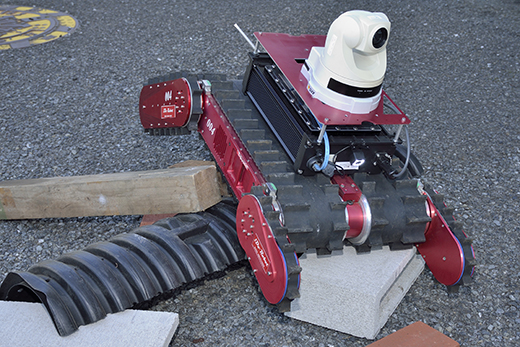
──現在、さまざまなレスキューロボットを開発されているなかで、主力となっている「アルバトロス」の特長を教えてください。
「アルバトロス」は遠隔操作で被災者の捜索や被害状況の調査ができるロボットで、障害物や段差がある場所もどんどん乗り越えて進むことができます。そして高精細カメラで要救助者の位置や被害状況を確認しながら走行し、安全が担保されているオペレータや災害対策本部のもとへ情報を送ります。
ガス漏れやトンネル災害では、ロボット自体が爆発源とならないように「防爆機能」を備えたモデルが必要です。石油化学プラントの事故など、可燃性ガスが発生している現場に対応できる製品も開発中です。
今は、先日発生した「令和6年能登半島地震」から問い合わせがきています(注)。
(注)取材日は2024年1月15日
──今まさに、過酷な現場での活用が進んでいるのですね。そのようなレスキューロボットを開発された原点は、どこにあるのでしょうか?
私はもともと神奈川県で工業高校の教師をしていたのですが、40代から筑波大学大学院に通ってロボット研究を進めていました。博士号を取得した2002年に桐蔭横浜大学の助教授、そして教授になって、2004年6月にはロボットの世界大会「ロボカップ」のレスキュー部門に学生たちと出場したんです。初出場だったんですが、ここで優勝したんですね。
みんなで「勝ったね!」と喜んでいたら、その4か月後に新潟県中越地震が起きました。そこで要請を受け、大学の協力のもとで出動したのが、災害現場でレスキューロボットを使った始まりです。このときは、下水道の被害状況調査で活用されました。
──競技で世界制覇してすぐ、実際の災害現場に投入されたのですね。翌年、2005年にもまたロボカップで優勝されているので、さらに進化を遂げられたことがわかります。
そうですね。でも、2度目の優勝の後で学生たちが「ロボカップはもういい。ちゃんと人の役に立つロボットをつくりたい」と言い出したんですね。新潟県中越地震で現場に行って、人に感謝される体験をした。そのときの喜びとロボカップの優勝を比較したら、人の役に立つほうがはるかに価値があると。学生たちの自発的な声から競技を卒業し、実践的なレスキューロボットの研究に集中しました。
──2011年の東日本大震災でも、ロボットが出動していますね。このときはどのような活動をされたのでしょうか?
原子力災害への対応を行いました。今までの経験は何ひとつ役に立たないというくらい、凄まじい現場でしたね。それまでは「対放射線」という機能は考えていなかったので、JAEA(国立研究開発法人日本原子力研究開発機構)の協力を得て放射能汚染を研究するなどして対応していきました。厚いコンクリートの壁に囲まれた原子炉建屋でいかに通信手段を確立するかという課題もあり、無線と有線を組み合わせたハイブリッド通信システムの実装にもつながっていきました。
特区が開発における重要なパートナーに

──さがみロボット産業特区の支援について伺います。2007年に会社を設立、2014年に公募型の「ロボット実証実験支援事業」、2015年には「重点プロジェクト」に採択されています。この時に藤沢消防署と共同で最初の実証実験を行っていますが、どのようにして進められたのでしょうか。
まずは当時開発していたレスキューロボットをハイパーレスキュー部隊隊員に紹介して機能を説明し、リクエストを受けました。カメラ、ガス検知、双方向での音声やり取り、さらに防水、防爆などいろいろありましたが、求められたことすべてを実装して新たなロボットを開発しました。
そして実際にできたロボットを見せたところ「こんなに大きくて重いとは…」と驚かれてしまったので、次にコンパクト化を実現しました。
──すべてのリクエストに応えられたのですね。その後、普及、販売を広げるためにビッグレスキュー神奈川(総合防災訓練)に参加されています。ここではどのような課題が明らかになりましたか?
このときは現場というより、「人前で動かすこと」の問題点が出てきました。ロボットの無線は2.4GHzを使っているんですが、それが消防車の無線とかち合ってしまうんです。防災訓練なので消防車が数十台集まり、その無線と混信して電波が通じなくなることがありました。弊社のロボットは光ファイバーによるハイブリッド通信システムを搭載しているので有線でも動くんですが、写真を撮っていた人がケーブルを踏んで光ファイバーが切れてしまい、通信が途切れて自動停止してしまったこともあります。
──実証実験だからこそ、思いがけないことも起こるものなのですね。
そういったすべての経験が、良かったと思います。どちらかといえば開発は失敗したほうが良くて、それを活かすことのほうが大切です。何でもそうですけど、実際に使ってみなければわからない。そうすることで課題がわかり、さらに良くなっていくんですよね。
──2017年には「アルバトロス」がさがみロボット産業特区から商品化、2022年には「除菌・滅菌を行うアバターロボット」、2023年に「農作業支援用の全方向移動ロボット」が開発を支援する事業として採択されています。このようなさがみロボット産業特区の支援はいかですか?
開発のパートナーとして、すごく良いと思います。特に災害対応ロボットは、平時にどれだけ使っているかということが非常に大事です。災害が起きてから操作の訓練をしても、間に合いませんから。藤沢消防署でロボットを導入されたときには、毎日、朝晩は絶対に署内で動かし、週に1回は必ず操作の訓練を実施していました。交代勤務の人にもちゃんと申し送りをされていたので、消防署との開発は非常に有意義なものになったと思います。
協業しながら知見を増やし、さらなる進化へ
──今では一般販売も開始されている「アルバトロス」ですが、どのような活用がされているのでしょうか?
例えば大手ゼネコンでは、トンネルを掘削する現場で使われています。山岳トンネルはドリルで掘り進みながら岩盤の地層を確認する必要があるのですが、崩落の危険があるので人はなかなか入れません。そこでロボットが入っていって、正面の地層と、トンネルを削った周囲をぐるりと撮影して送ります。それを連日繰り返してつなげていけば地層のねじれなどがわかり、発破の量など工事の進め方を予測することができます。
──災害現場以外でも活用が広がっているのですね。レスキューロボットの今後の展望をお聞かせください。
我々は、マーケティングをしてこういうロボットをつくったら売れるだろうという会社では、まったくないんです。今こういうことで困っているので何とかならないか?という相談に対して、我々の知見を活かし、先方がいろいろと苦労をしてきたことも踏まえて、解決策を提案する。それは良さそうだねということで、仕事がつながってきました。
なので、移動ロボット研究所には営業担当者が一人もいないんですよ。協業が当たり前のスタイルで、これからもそのようにして開発を進めていきます。一番重要なことは人の命を守ることで、仕事中に命を落とすことはあってはならない。そういうロボットを最優先課題として開発していきます。
今、ある大学で「アルバトロス」を研究に使いたいと言っている人たちがいて、実は明日、そのデモにいくんです。クローラロボットの専門家集団なので、共同開発をするとまた進化系ができるかもしれません。
──最後に、さがみロボット産業特区に関心を持っている企業さま、技術者の皆さまに向けて、メッセージをお願いいたします。
まず、失敗を恐れないこと。10回挑戦して、3回当たったらすごい勝率ですよ。そのうちの7回が無駄になっているかといったらそうではなく、その後にまた役に立ちます。
そして一番重要なことは、「思いつき」です。苦労していることや不便だなと思うことがあったとき、「私だったらこうする」という思いつきは、たくさんあったほうがいい。
我々も仕事として受けた以上、納期の間際でどうしようもないというのは避けたいですから、「よし、これで行こう」と決めたあとに、絶対にバックアッププランをつくります。ここで、どれほど優秀なバックアッププランがつくれるかが大事。だから、思いつきはたくさんあったほうがいいんです。豊富なプランをつくれるだけの知見を持つために、これからもいろいろな方々と協力していきたいですね。
「アルバトロス」の3D閲覧・AR体験ページへのリンク